
|
Niall L. Williams
Assistant Professor
|
[About Me] [News] [Publications] [Teaching] [Fun Stuff]
About Me
I am an Assistant Professor of Computer Science at Barnard College, Columbia University. My research sits at the intersection of computer graphics and visual perception. I use graphics as a tool to probe how perception works, and I use what we know about perception's capabilities and limitations to improve interactive graphics experiences (e.g. virtual & augmented reality).
I completed a PhD in Computer Science at the University of Maryland, College Park, where I was a member of the GAMMA lab. My PhD was under the supervision of Prof. Dinesh Manocha, Prof. Aniket Bera, and Prof. Ming C. Lin. My dissertation is titled "Computational Methods for Natural Walking in Virtual Reality." During my PhD, I interned at Meta Reality Labs with Dr. Ian Erkelens and Dr. Phillip Guan, and at NVIDIA with Dr. Ruth Rosenholtz and Dr. Jae-Hyun Jung. After finishing my PhD, I worked as a postdoc at the Graphics & Imaging Lab at the University of Zaragoza with Prof. Ana Serrano and as a Faculty Fellow at the New York University Tandon School of Engineering and a member of the Immersive Computing Lab with Prof. Qi Sun.
I graduated with a B.S. with High Honors in Computer Science from Davidson College. During my time at Davidson, I was a member of the DRIVE lab, where I was advised by Prof. Tabitha C. Peck. My undergraduate thesis studied visual motion perception thresholds in virtual reality under different conditions and how we can efficiently estimate them.
My name is pronounced in the same way that you pronounce the name "Nile."
In my free time, I enjoy bouldering and competitive video games (DotA 2 and Tetris).
News
- July 2026: Joined Barnard College as a tenure-track assistant professor!!!
- June 2026: One conference paper conditionally accepted to ISMAR 2026!
- February 2026: Our workshop "From Human Vision to Machine Vision" has been accepted to SIGGRAPH 2026!
- February 2026: Started a postdoc at Graphics & Imaging Lab at the University of Zaragoza, working with Prof. Ana Serrano!
- November 2025: One conference paper accepted to WACV 2026!
- All news...
Journal and Conference Publications
|
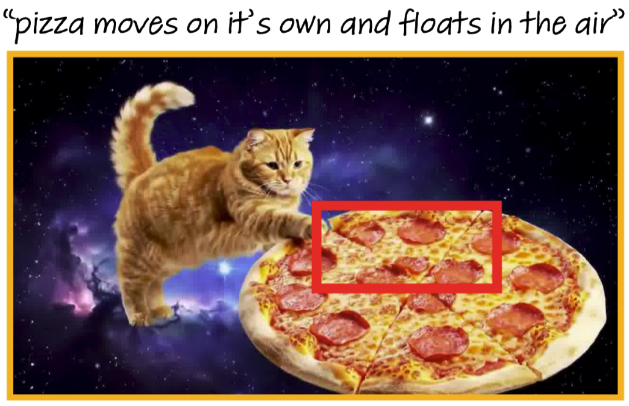
GeneVA: A Dataset of Human Annotations for Generative Text to Video Artifacts Jenna Kang, Maria Beatriz Silva, Patsorn Sangkloy, Kenneth Chen, Niall L. Williams, Qi Sun IEEE/CVF Winter Conference on Applications of Computer Vision, 2026 [Paper] [arXiv] [Project Page] [Dataset: Videos Annotations] [Bibtex] We collected human annotations of visual artifacts and quality score ratings for over 16,000 AI-generated videos and organized the artifacts into different categories. |

|
Performance Analysis of Catch-Up Eye Movements in Visual Tracking Jenna Kang, Budmonde Duinkharjav, Niall L. Williams, Qi Sun ACM SIGGRAPH Asia, 2025 [Paper] [Project Page] [Bibtex] [DOI] We model the latency dynamics of catch-up eye movements for visual tracking tasks with abrupt changes in target speed as a function of the target's visibility. |

|
Sensitivity to Redirected Walking Considering Gaze, Posture, and Luminance Niall L. Williams, Logan C. Stevens, Aniket Bera, Dinesh Manocha Transactions on Visualization and Computer Graphics, 2025 Proc. IEEE VR 2025 [Paper] [arXiv] [Project Page] [Bibtex] [DOI] We measured users' sensitivity to rotation gains in photopic and mesopic luminance conditions and measured the correlations between rotation gains and physiological signals (gaze and posture data). |
|
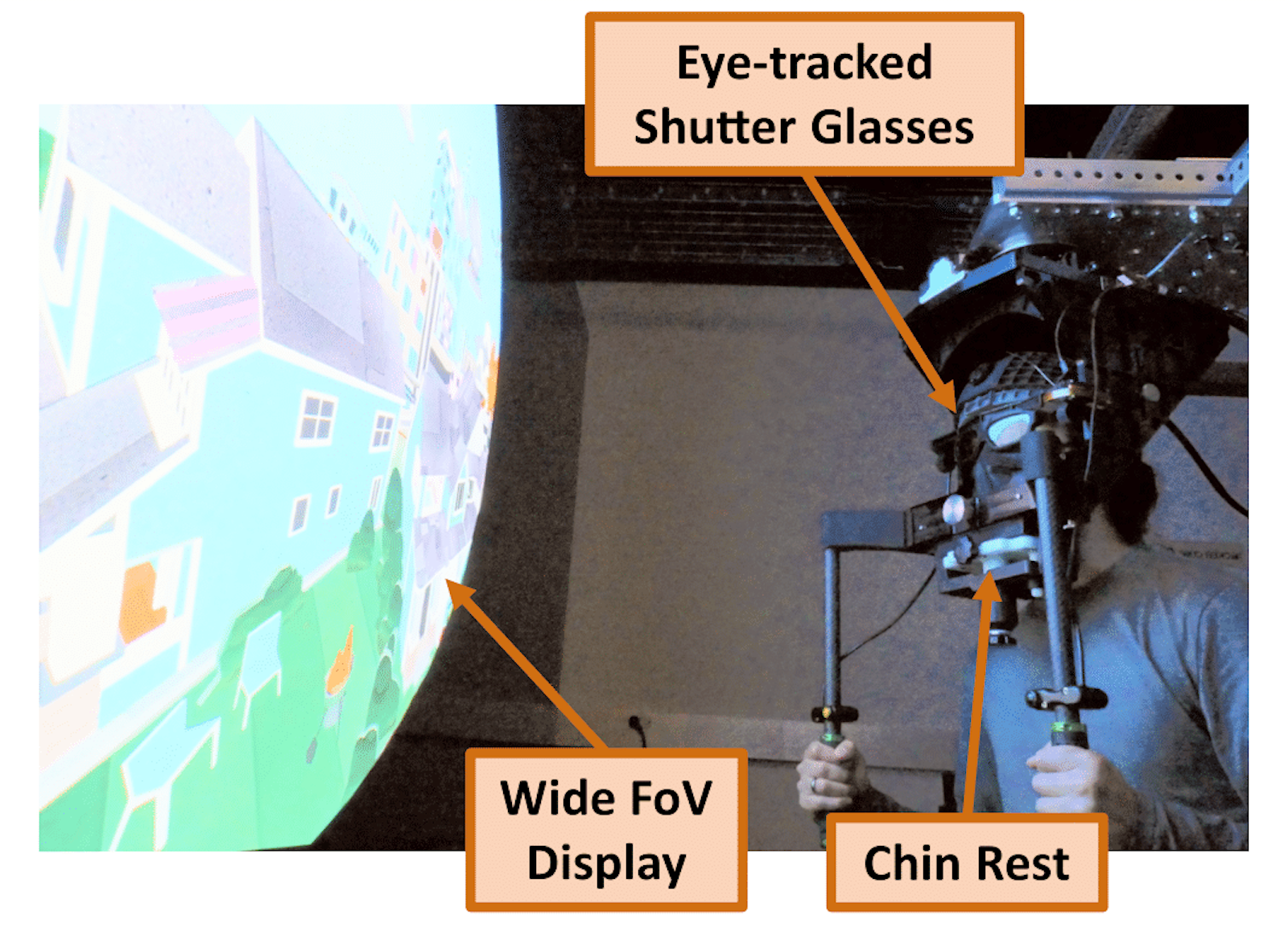
Perceptual Thresholds for Radial Optic Flow Distortion in Near-Eye Stereoscopic Displays Mohammad R. Saeedpour-Parizi, Niall L. Williams, Tim Wong, Phillip Guan, Dinesh Manocha, Ian M. Erkelens Transactions on Visualization and Computer Graphics, 2024 Proc. IEEE VR 2024 [Paper] [arXiv] [Project Page] [Bibtex] [DOI] We measured how sensitive observers are to image magnification artifacts in near-eye displays and to what extent we can leverage blinks to decrease their visual sensitivity, with applications to mitigating the vergence-accommodation conflict. |
|
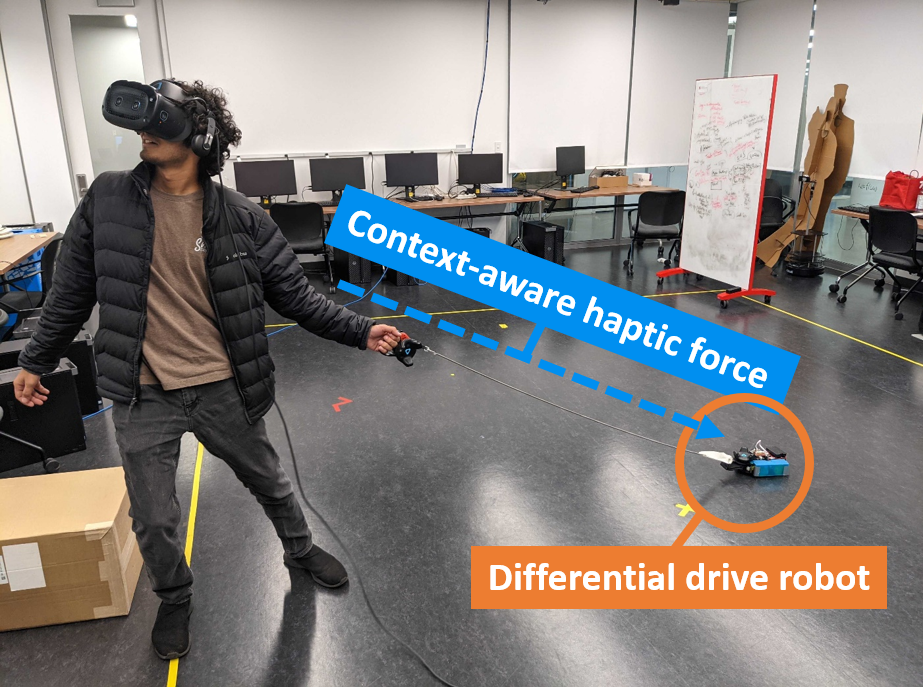
A Framework for Active Haptic Guidance Using Robotic Haptic Proxies Niall L. Williams*, Nicholas Rewkowski*, Jiasheng Li, Ming C. Lin IEEE International Conference on Robotics and Automation (ICRA), 2023 [Paper] [arXiv] [Project Page] [Video] [Bibtex] [DOI] We used a robot to proactively generate context-aware haptic feedback that influences the user's behavior in mixed reality, to improve the immersion and safety of their virtual experience. |
|
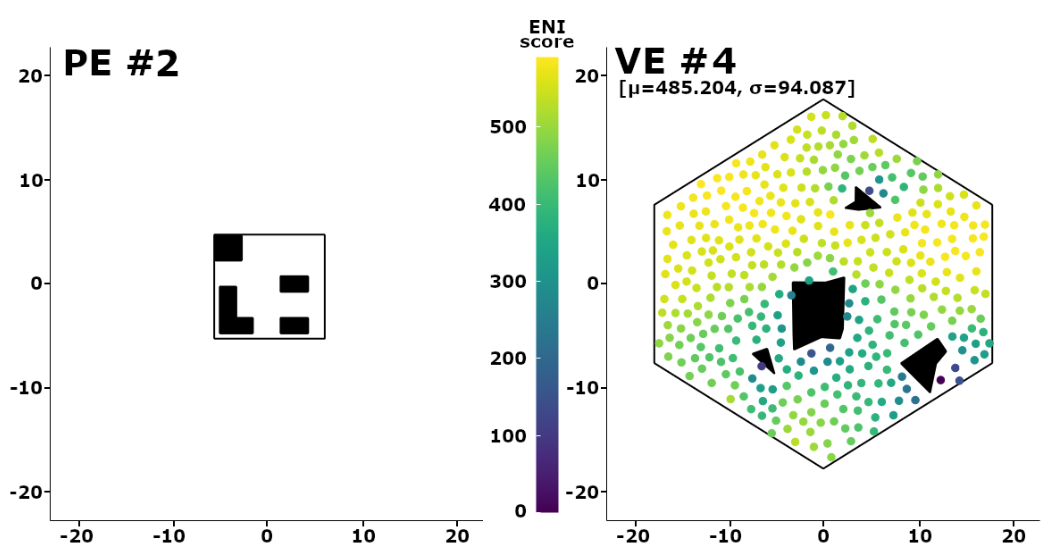
ENI: Quantifying Environment Compatibility for Natural Walking in Virtual Reality Niall L. Williams, Aniket Bera, Dinesh Manocha IEEE Conference on Virtual Reality and 3D User Interfaces (IEEE VR), 2022 [Best Paper Honorable Mention] [Paper] [arXiv] [Project Page] [Video] [Code] [Bibtex] [DOI] We provide a metric to quantify the ease of collision-free navigation in VR for any given pair of physical and virtual environments, using geometric features. |
|
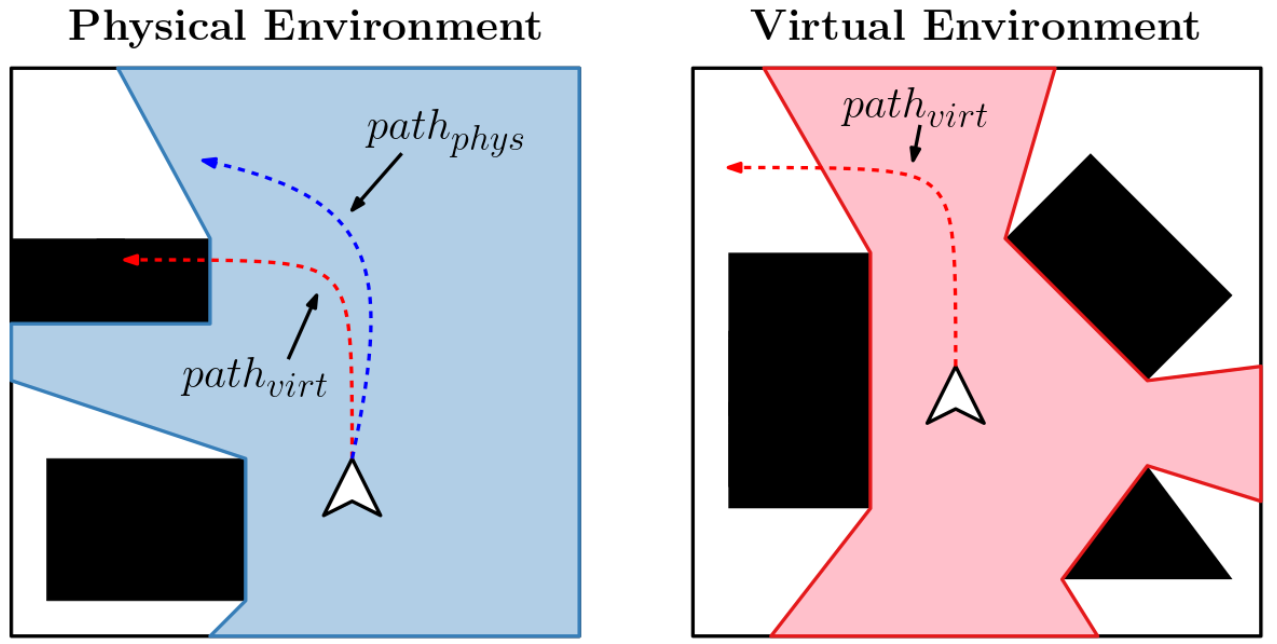
Redirected Walking in Static and Dynamic Scenes Using Visibility Polygons Niall L. Williams, Aniket Bera, Dinesh Manocha Transactions on Visualization and Computer Graphics, 2021 Proc. IEEE ISMAR 2021 [Best Paper Honorable Mention] [Paper] [arXiv] [Project Page] [Video] [Code] [Bibtex] [DOI] We formalize the redirection problem using motion planning and use this formalization to develop an improved steering algorithm based on the similarity of physical and virtual free spaces. |
|
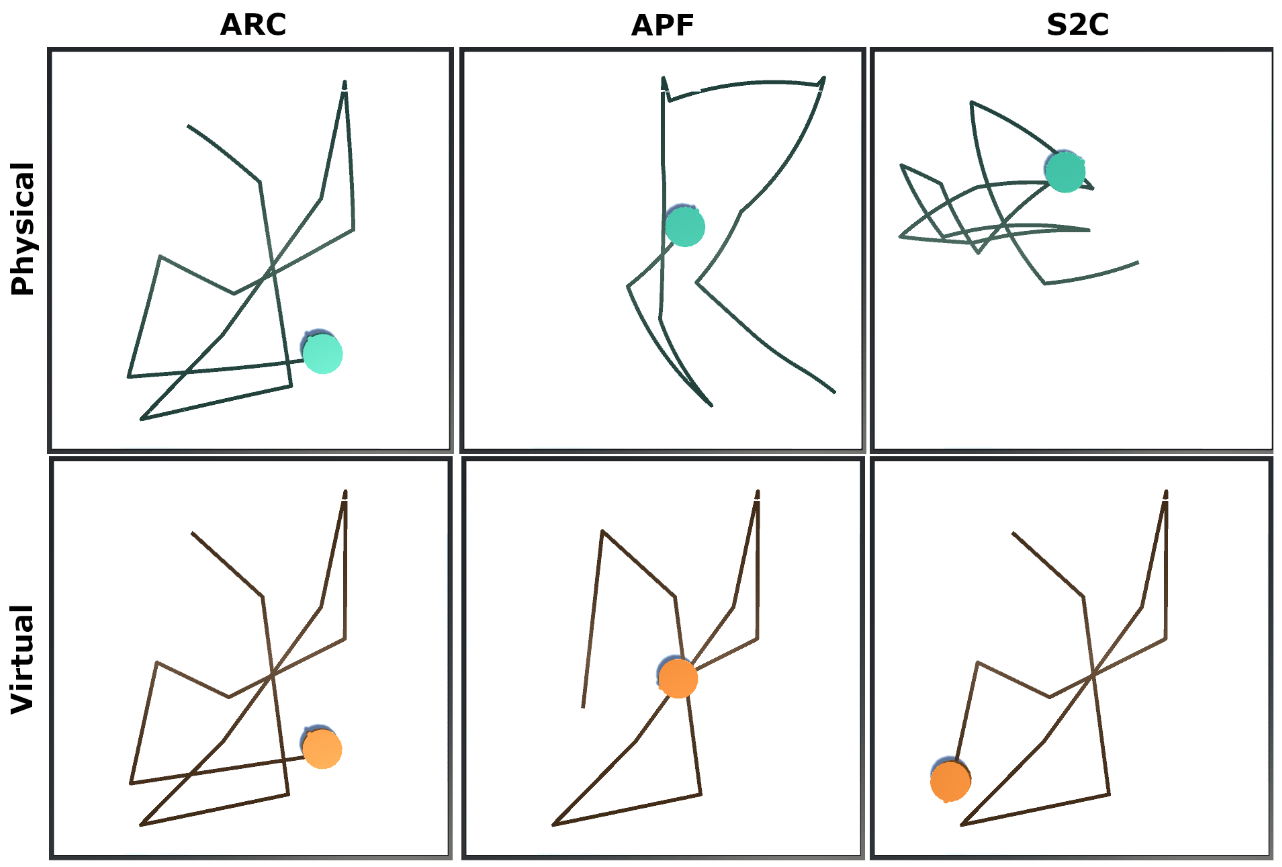
ARC: Alignment-based Redirection Controller for Redirected Walking in Complex Environments Niall L. Williams, Aniket Bera, Dinesh Manocha Transactions on Visualization and Computer Graphics, 2021 Proc. IEEE VR 2021 [Best Paper Honorable Mention] [Paper] [arXiv] [Project Page] [Video] [Code] [Bibtex] [DOI] We achieve improved steering results with redirected walking by steering the user towards positions in the physical world that more closely match their position in the virtual world. |

|
PettingZoo: Gym for Multi-Agent Reinforcement Learning J. K. Terry, Benjamin Black, Mario Jayakumar, Ananth Hari, Ryan Sullivan, Luis Santos, Clemens Dieffendahl, Niall L. Williams, Yashas Lokesh, Caroline Horsch, Praveen Ravi Neural Information Processing Systems (NeurIPS), 2021 [Paper] [Website] [arXiv] [Code] [Bibtex] One of the most popular libraries for multi-agent reinforcement learning. |
|
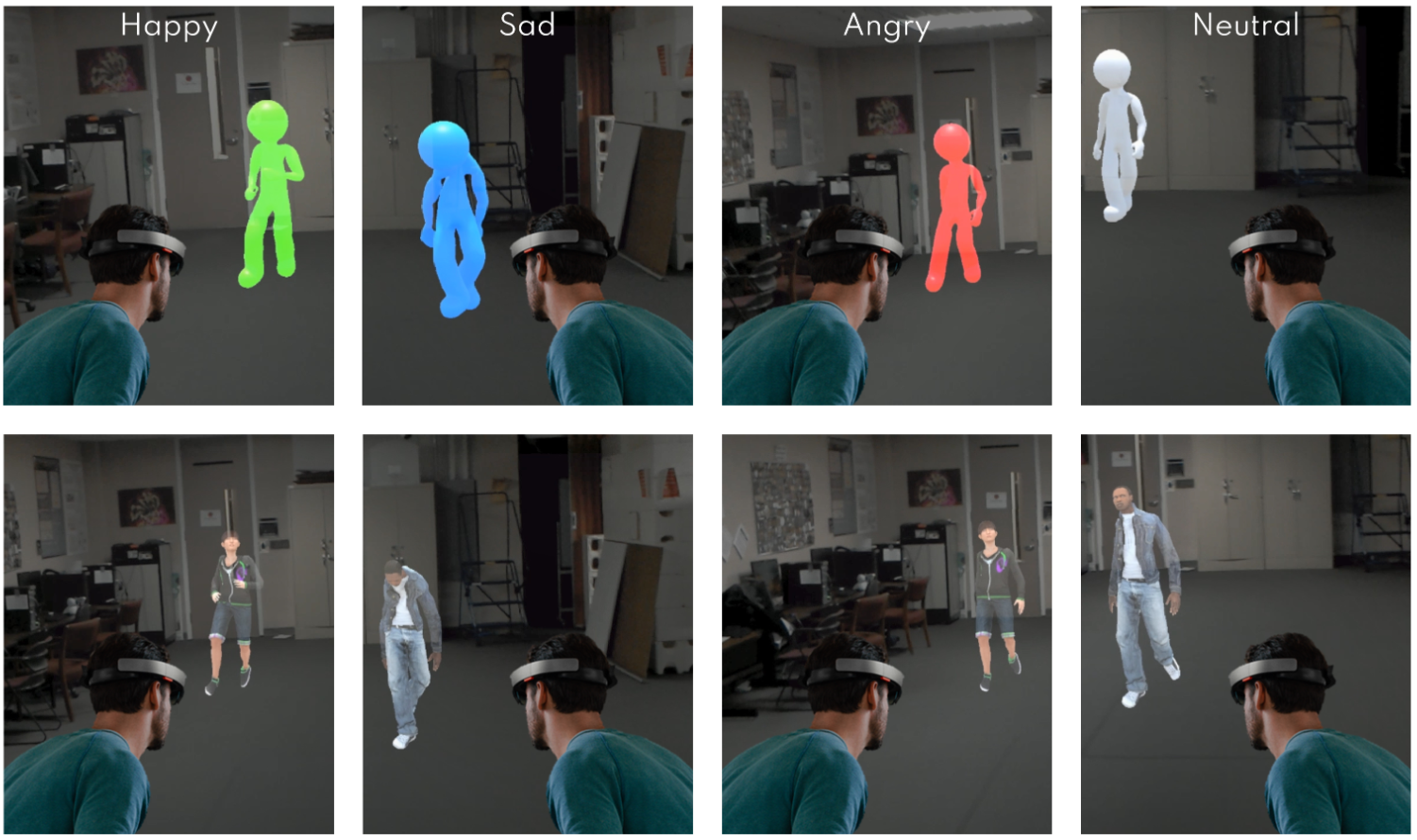
Generating Emotive Gaits for Virtual Agents Using Affect-Based Autoregression Uttaran Bhattacharya, Nicholas Rewkowski, Pooja Guhan, Niall L. Williams, Trisha Mittal, Aniket Bera, Dinesh Manocha IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2020 [Paper] [arXiv] [Project Page] [Video] [Code] [Bibtex] [DOI] We automatically synthesize emotionally expressive gaits for virtual avatars using an autoregression network. |
|
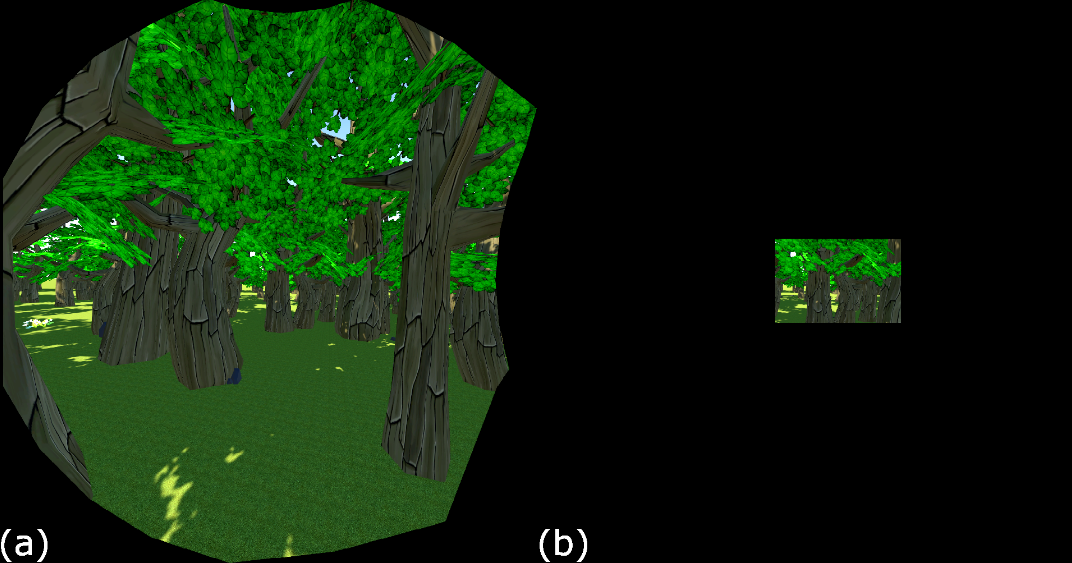
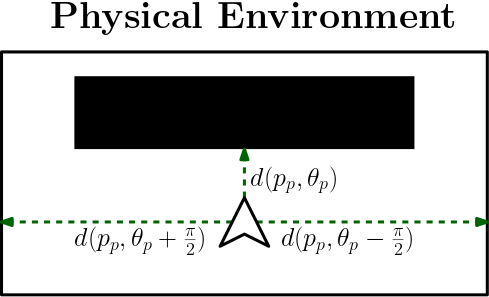
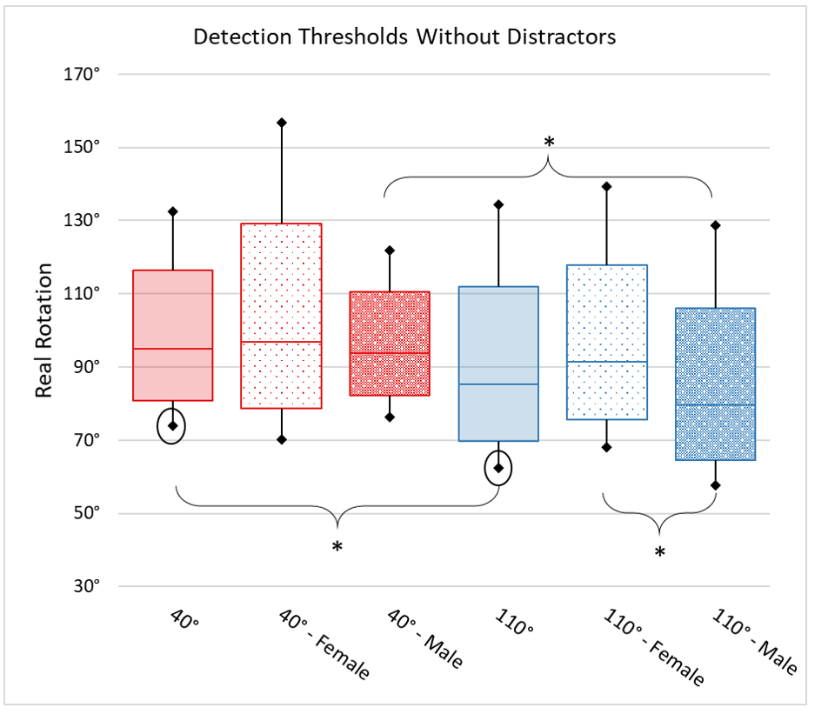
Estimation of Rotation Gain Thresholds Considering FOV, Gender, and Distractors Niall L. Williams, Tabitha C. Peck Transactions on Visualization and Computer Graphics, 2019 Proc. IEEE ISMAR 2019 We measured perceptual thresholds for redirected walking and found that the user's tolerance for redirection depends on the field of view, the presence of distractors, and their gender. |
Workshop Papers and Posters

|
Who you lookin' at? Perception of gaze direction in group settings depends on naturalness of gaze behavior and clutter Ruth Rosenholtz, Niall L. Williams Vision Sciences Society, 2024 [Poster PDF] [JoV Abstract] [Bibtex] [DOI] We measured how accurately people can judge the gaze direction of digital human avatars realistic, naturalistic scene with natural and unnatural body poses. |
|
Redirection Using Alignment Niall L. Williams, Aniket Bera, Dinesh Manocha IEEE VR Locomotion Workshop, 2021 We provide a general framework for how alignment can be used in redirected walking to steer the user towards similar physical and virtual positions. |
|
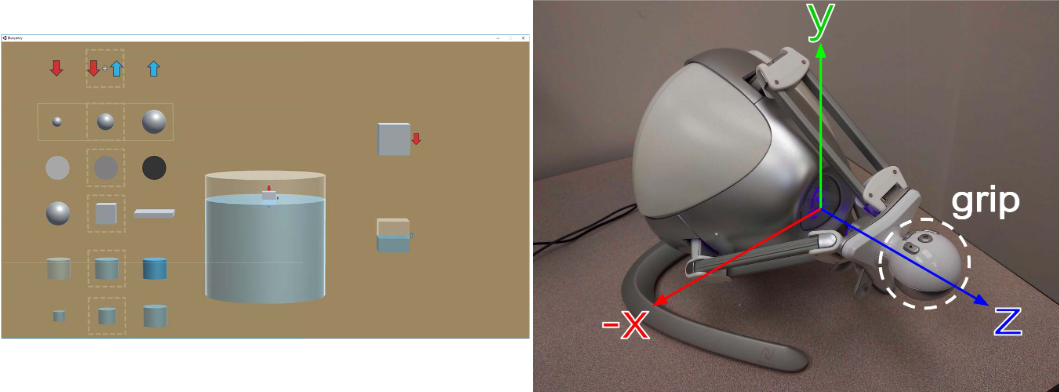
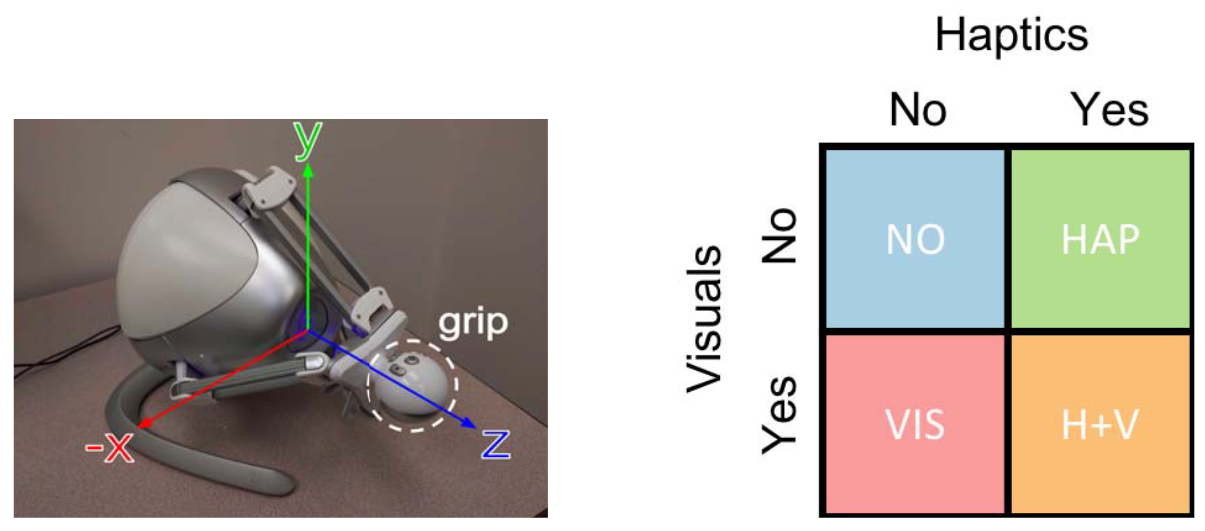
Augmenting Physics Education with Haptic and Visual Feedback Kern Qi, David Borland, Emily Jackson, Niall L. Williams, James Minogue, and Tabitha C. Peck IEEE VR 5th Workshop on K-12+ Embodied Learning through Virtual & Augmented Reality (KELVAR), 2020 Using haptic force feedback to help teachers better understand physics concepts. |
|
The Impact of Haptic and Visual Feedback on Teaching Kern Qi, David Borland, Emily Jackson, Niall L. Williams, James Minogue, and Tabitha C. Peck IEEE Conference on Virtual Reality and 3D User Interfaces, 2020 [2-page Abstract] [Bibtex] [DOI] |
|
Estimation of Rotation Gain Thresholds for Redirected Walking Considering FOV and Gender Niall L. Williams, Tabitha C. Peck IEEE Conference on Virtual Reality and 3D User Interfaces, 2019 [2-page Abstract] [Bibtex] [DOI] |
Invited Talks
|
ARC: Alignment-based Redirection Controller for Redirected Walking in Complex Environments Niall L. Williams SIGGRAPH TVCG Session on VR, 2021 [Video] |
Teaching
- New York University
- Introduction to Programming and Problem Solving (CS-UY 1114 D) Instructor Spring 2025
- Information Visualization Instructor (CS-GY 6313 B) Fall 2024
- University of Maryland, College Park
- Advances in XR Head TA (CMSC838C) Spring 2024
- Game Programming TA (CMSC425) Fall 2023
- Advances in XR Head TA (CMSC838C) Spring 2023
- Advances in XR TA (CMSC838C) Spring 2022
- Advanced Data Structures TA (CMSC420) Fall 2021
- Bioinformatic Algorithms, Databases, and Tools TA (CMSC423) Spring 2021
- Advanced Data Structures TA (CMSC420) Fall 2020
- Game Programming TA (CMSC425) Spring 2020
- Advanced Data Structures TA (CMSC420) Fall 2019
- Davidson College
- Computer Science Tutor 2018 - 2019
- Computer Science Head TA Spring 2019
- Computer Science Grader 2017 - 2018
Fun Stuff
Useful resources:
- LaTeX abstract extractor
- Time conversion for anywhere-on-earth.
- Poster templates
- SIGACCESS guide to making your PDFs accessible to people with disabilities.
- SIGACCESS guide to making your presentations accessible to people with disabilities.
- PAVE2 software for making PDFs accessible.
- Article about how to get involved in research as an undergraduate student.
- Books for graduate students.
- Math for computer graphics.
- Tour of computer graphics.
- Statistical test cheat sheet (UCLA).
- Statistical test cheat sheet (Andy Field book).
- Color scheme resource.
- Advice for CS PhD students.
- 10 tips for academic talks.
- How to speak.
- How to title a paper, by Jitendra Malik
- How to organize a presentation by Theodore Kim.
- Accepted and rejected grant application examples.
- Secrets to writing a winning grant
- How to organize your calendar
- Latin square calculator
- USA CS PHD FAQ
- Information on asking about name/gender on data-collection forms.
- Guide to postdoc
- Bibtex cleaning tool
- Applying to Ph.D. Programs in Computer Science
- Demystifying the American Graduate Admissions Process
- Nifty assignment ideas
- Online "course" for learning graphics programming.
- Automatically generate and add subtitles to a video.
- Visual Angle (Field of View) Calculator
- Crystal Lee: Salary + negotiation notes for academia
- Math for 3D graphics.
- Unit Circle angle visualizer
- 10-minute Physics for Computer Graphics
- DIY build your own chinrest #1
- DIY build your own chinrest #2
- CS Academic Job Guide
- VESA standards for display measurement/calibration
- Brian Wandell's Useful Vision Values
- Dr. Svetlana Yarosh's PhD Guide
- Dr. Jon Froehlich's Lab Handbook
- "The CS Assistant Professor Handbook" by Vijay Chidambaram
- Tool to generate biosketches in the required format for NIH/NSF grants
- Display resolution calculator
- SIGGRAPH trends (Anjul Patney)
- Graphics publications list (Ke-Sen Huang)
- Growing a Language, by Guy Steele
- My productivity app is a never-ending .txt file
- What profs look for in grad school applications
- Specs grading
- "Learn Visual Computing" book by Prof. Yuhao Zhu
- How to Set Up and Run an Undergraduate Research, by Lab Julia Strand
- Contrast Gain Control demo by Michael Bach
- NYC Funding fact sheet
- Opening statements of NSF/NIH/NASA leaders in front of Congress
- SIGSOFT review checklist
- CS Jobs at Undergrad Institutions (PUIs)
Fun reads/cool things:
|
|